We're now ready to discuss some results from our JSBSim flight dynamics simulation. In this post, we'll talk mainly about how to survive maximum aerodynamic pressure, or max q.
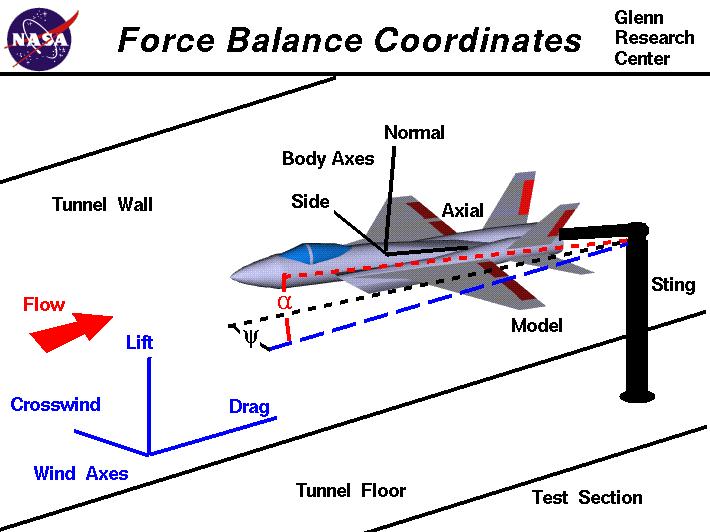
Let's begin by defining the coordinate systems used for our rocket, as well as major forces and velocities involved.

The engines produce a forward thrust that pushes the rocket along the direction of velocity V. Most liquid rocket engines require a little bit of time to develop enough thrust to be able to lift the combined mass of the rocket plus fuel and oxidizer off the ground. During this short period, a hold down mechanism is typically used to keep the rocket stable on the pad. While the rocket is flying within the atmosphere, a drag force due to air resistance (wind) directly opposes the rocket's thrust.
If the rocket's velocity vector is not aligned with the actual pitch angle with the horizon, the resulting angular difference is called the angle of attack alpha. A large alpha may result in a strong perpendicular lifting force due to aerodynamic lift. This is usually bad, because for a long object such as a rocket, excessive perpendicular forces could cause the rocket to bend and result in structural failure. Thus many rockets aim to fly a zero angle of attack and throttle back during flight through max q. This reduces bending forces to a manageable extent.
The following Octave (Matlab) plots of a JSBSim run demonstrate the gravity turn maneuver in terms of pitch angle variation with time (left) and angle of attack (right). A 90-degree pitch angle means "vertical" and 0-degrees is "horizontal". Dynamic pressure appears as peaks in both plots.

Notice how the gravity turn drops the angle of attack to zero just before peak dynamic pressure. We're also throttling back all main engines to 75% at MET+79 and throttling up again at MET+129. To show how bad things would be like without these countermeasures, here is another JSBSim run, but with no engine throttling and the gravity turn approximated by a straight line. Max q is now about 66% greater (500 psi), and the angle of attack nearly hits 7 degrees (as a rule of thumb, most launch vehicles try not to go beyond 4 degrees while passing through max q):

At this point, it is important to note that zero alpha is not a panacea. In fact, zero alpha must not (and does not have to) be maintained throughout the whole flight. This is because sticking to such a flight profile can result in excessive pitchover, and penalties in altitude gain later in flight (see for example: Turner, 2006. Rocket and Spacecraft Propulsion: Principles, Practice and New Developments). So we switch to a lower rate of pitchover as soon as we can (once the rocket passes max q). This allows the rocket to gain altitude more quickly. The following plot illustrates this nicely. Apart from revealing that our rocket has come a long way since our initial experiments and is now able to reach altitudes >1,500,000 ft (>450 km!), notice how the altitude line becomes steeper after passing through the gravity turn phase, indicating that the rocket is able to gain altitude quicker:

Sideways winds gives rise to side forces that causes the rocket to yaw (swivel and spin sideways). Left unchecked, this can result in oscillations that lead to destabilization and tumbling (as we saw in our earlier experiments with OpenRocket). Thus we have also added controllers for holding the yaw rate steady by actuating the first and second stage engines.
In verifying the performance of our yaw and pitch control, it is useful to look at the 3 different components u, v, w of the total velocity V:
- u: Velocity directly along the axis of the rocket ("forward")
- v: Sideways velocity
- w: Vertical velocity
To be continued...